Listing of calibrate.m
% CALIBRATE % % Function to perform camera calibration % % Usage: C = calibrate(im, XYZ, uv) % % Where: im - is the image of the calibration target. % XYZ - is a n x 3 array of XYZ coordinates % of the calibration target points. % uv - is a 2 x n array of the image coordinates % of the calibration target points. % C - is the 3 x 4 camera calibration matrix. % % This function plots the uv coordinates onto the image of % the calibration target. It also projects the XYZ coordinates % back into image coordinates using the calibration matrix % and plots these points too as a visual check on the accuracy of % the calibration process. % Lines from the origin to the vanishing points in the X, Y and % Z directions are overlaid on the image. % The mean squared error between the positions of the uv coodinates % and the projected XYZ coordinates is also reported. % % The function should also report the error in satisfying the % camera calibration matrix constraint - the magnitude of % (q1 x q3).(q2 x q3) % function C = calibrate(im, XYZ, uv) % obtain rows so arbitrary number of points can be used [rows, cols] = size(XYZ); XYZ1 = [XYZ, ones(rows, 1)]; % makes it easier to work with % build B matrix for n = 1:rows B(2*n-1, :) = [XYZ1(n, :) 0 0 0 0 -uv(1, n)*XYZ(n, :)]; B(2*n, :) = [0 0 0 0 XYZ1(n, :) -uv(2, n)*XYZ(n, :)]; end c = B \ uv(:); c(12) = 1; C = reshape(c,4,3)' XYZ1 = XYZ1'; for i = 1:rows suv(:,i) = C*XYZ1(:,i); suv(:,i) = suv(:,i)/suv(3,i); end % calculate the mean squared error between the positions of the uv coodinates and suv. mse = mean(mean((uv - suv(1:2,:)).^2)); fprintf(1, 'mean squared error is %d\n', mse); % calculate the error in satisfying the camera calibration matrix constraint q1 = C(1,1:3)'; q2 = C(2,1:3)'; q3 = C(3,1:3)'; error = abs(dot(cross(q1, q3), cross(q2, q3))); fprintf(1, 'error in satisfying the camera calibration matrix is %d\n', error); % annotate image imshow(im); hold; % plot uv coordinates plot(uv(1, :), uv(2, :),'rx') % plot XYZ coordinates plot(suv(1,:), suv(2,:),'b+') % draw vanishing lines for i = 1:3 line([C(1,4), C(1,i)/C(3,i)],[C(2,4), C(2,i)/C(3,i)]) end hold;
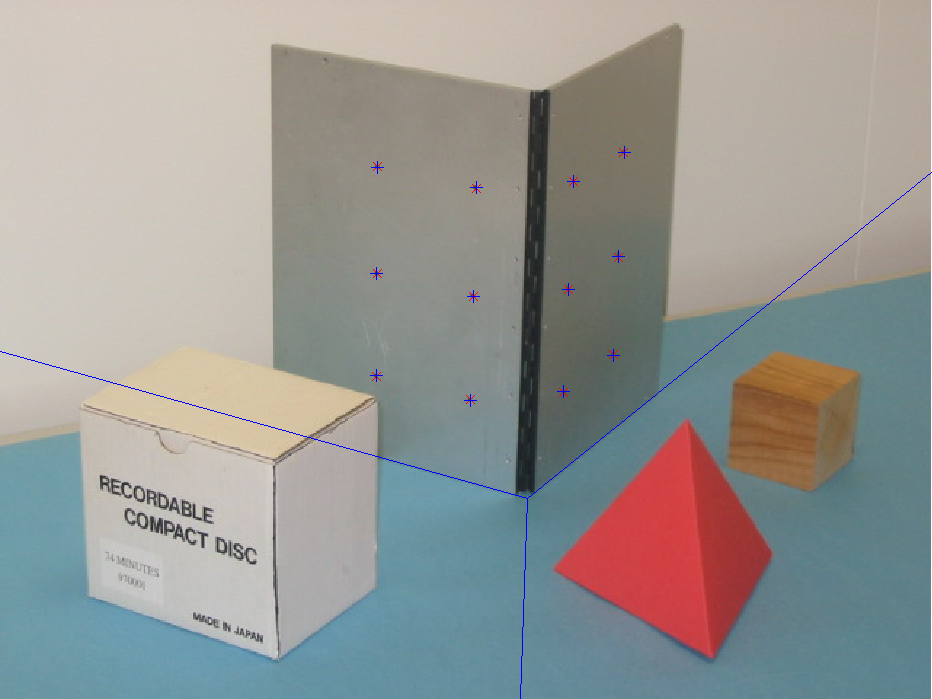
Mean squared error is 1.229390e-001
Error in satisfying the camera calibration matrix is 8.796030e-010
% uv matrix obtained for stereo1.jpg uv1 = [388 422 391 426 395 429 259 324 260 326 260 328; 270 244 199 177 125 105 259 275 188 204 115 130]; % camera calibration maxtrix for stereo1.jpg c1 = [0.6596 -0.7391 -0.0615 363.4235; -0.1851 -0.1387 -0.9437 342.7417; 0.0005 0.0003 -0.0003 1.0000];
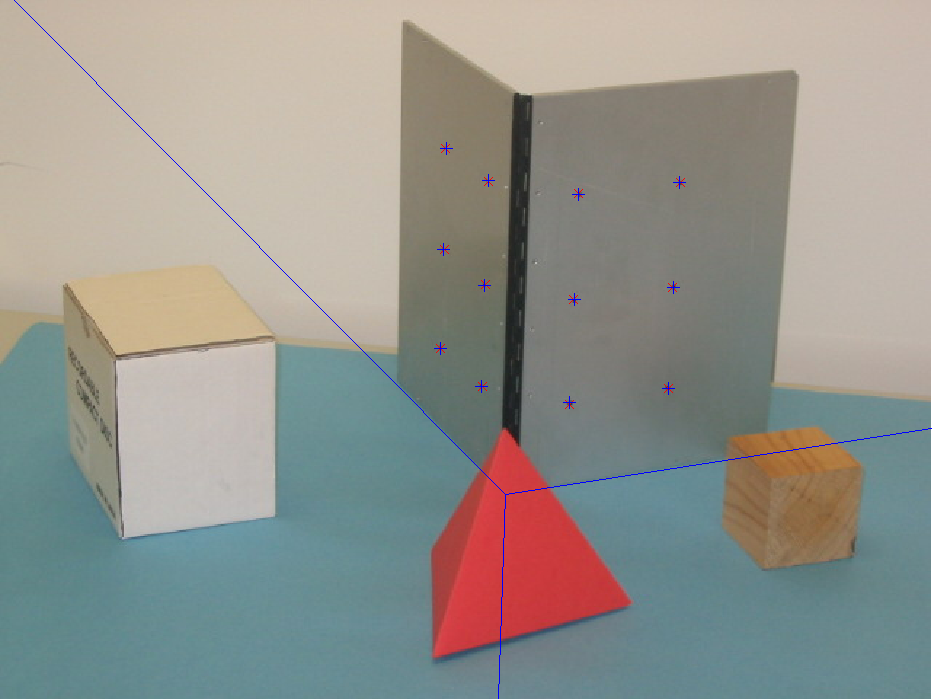
mean squared error is 1.695418e-001
error in satisfying the camera calibration matrix is 9.944410e-010
% uv matrix obtained for stereo2.jpg uv2 = [392 460 395 463 398 468 303 332 306 334 307 336; 278 267 206 198 133 126 240 266 172 196 102 125]; % camera calibration maxtrix for stereo2.jpg c2 = [0.9234 -0.2221 -0.0257 347.7796; -0.0741 -0.2278 -0.9168 339.8960; 0.0002 0.0004 -0.0002 1.0000];