Robotics315 2004
Travis Hydzik 011211X
Plots
puma3dof in the zero position puma3dof.png puma3dof.fig
puma3dof with joint angles (-pi/4, pi/6, -pi/6) puma3dof.png puma3dof.fig
stanford3dof in the zero position stanford3dof.png stanford3dof.fig
stanford3dof with joint parameters (-pi/4, pi/6, 1.0) stanford3dof.png stanford3dof.fig
puma6dof in the zero position puma6dof.png puma6dof.fig
puma6dof with joint angles (-pi/4, pi/6, -pi/6, 0, 0, 0) puma6dof.png puma6dof.fig
A plot of the robot motion motion.png motion.fig
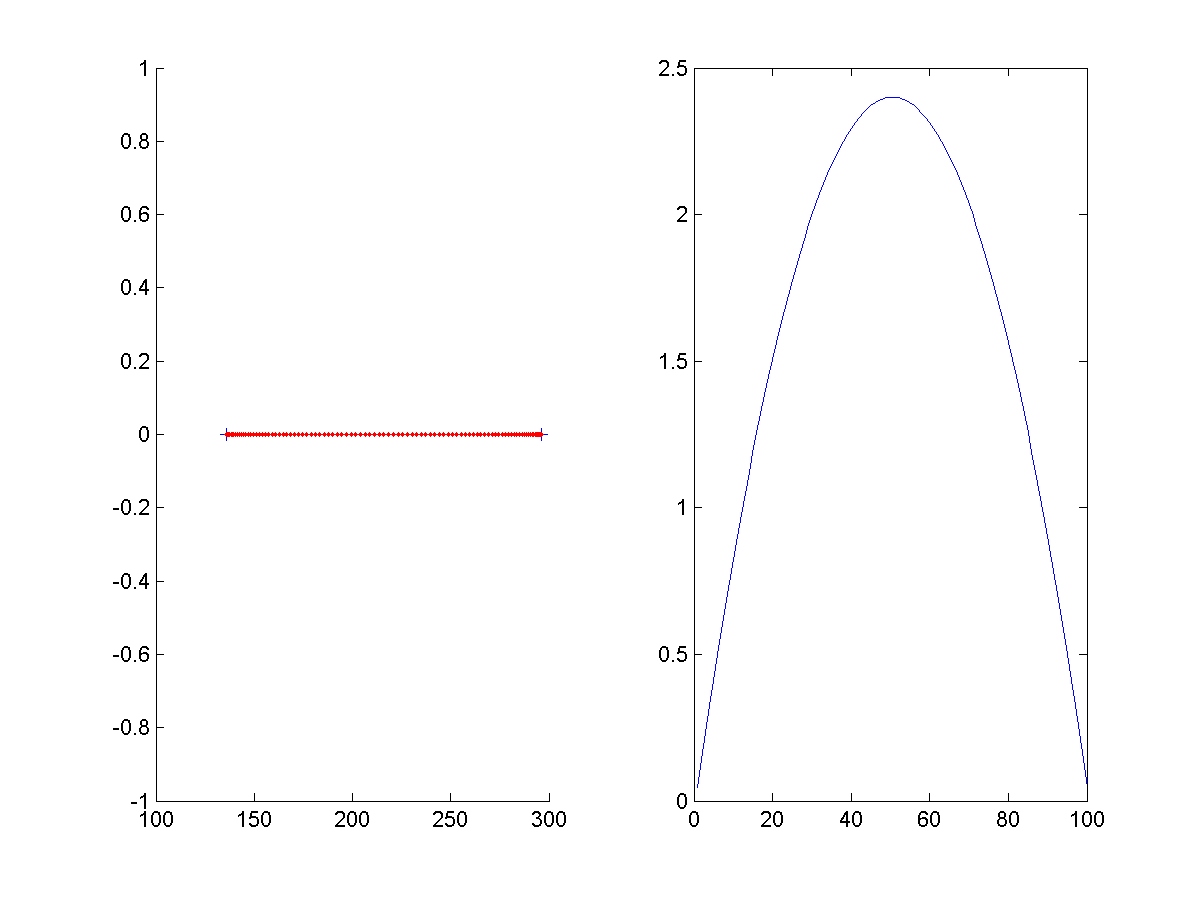
A 1D cubic Bezier curve with 2 control points over the start point and 2 control points over the end point. 1D.png 1D.fig
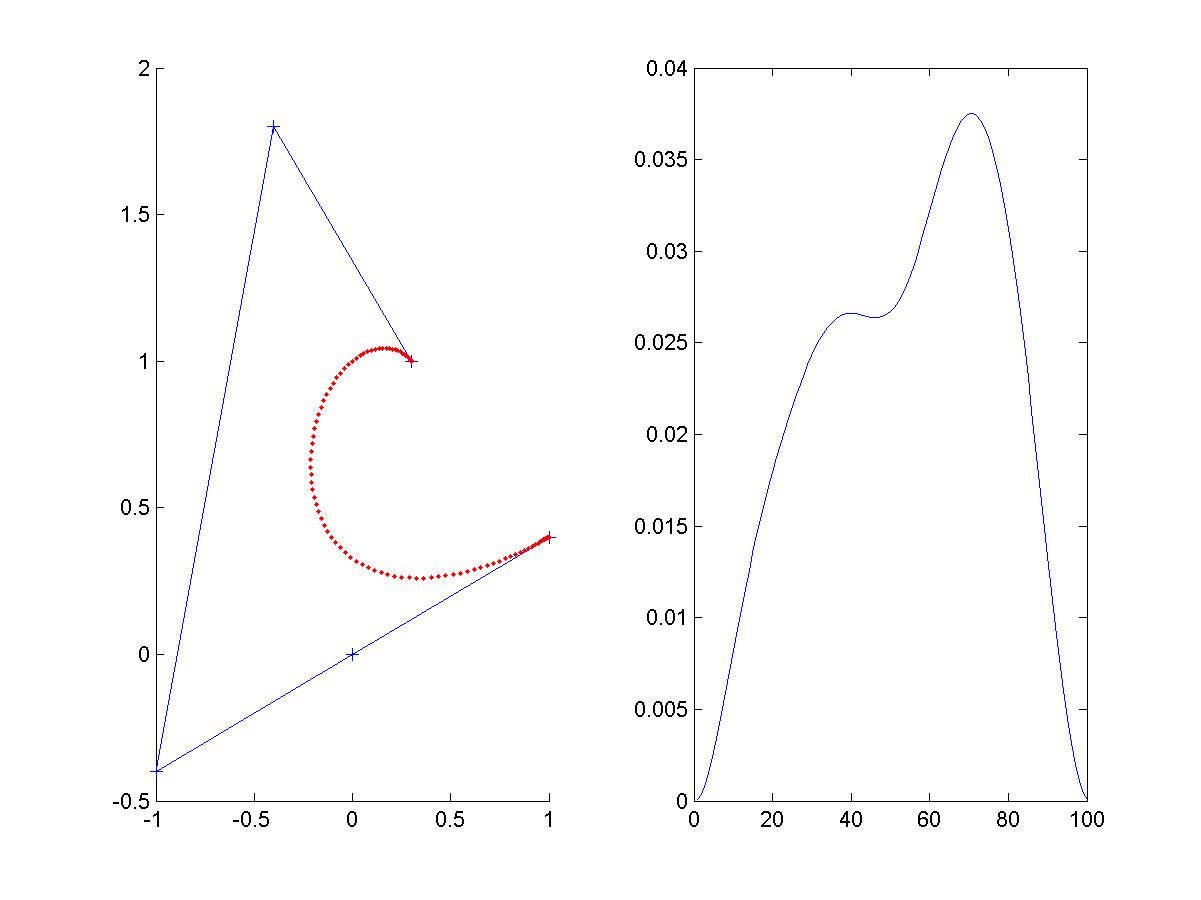
A 2D curve with 3 control points over the start point, 3 intermediate points, and 3 control points over the end point. 2D.png 2D.fig
3D bezier curve specified by 9 control points. 3D.png 3D.fig
See here for control points used createplots.html
Listings
Lab 1 ForwardKinematics.html ForwardKinematics.m
Lab 2 rotx.html rotx.m roty.html roty.m rotz.html rotz.m trans.html trans.m plotframe.html plotframe.m
Lab 3 DHtrans.html DHtrans.m stanford3dof.html stanford3dof.m
Lab 4 puma3dof.html puma3dof.m transsurf.html transsurf.m closedcylinder.html closedcylinder.m cosmetics.html cosmetics.m
Lab 5 invpuma6dof.html invpuma6dof.m inveuler.html inveuler.m invht.html invht.m
Lab 6 bezier.html bezier.m plotbezier.html plotbezier.m startCubicBez.html startCubicBez.m goThrough.html goThrough.m stopCubicBez.html stopCubicBez.m plotCubicBez.html plotCubicBez.m
Lab 7 puma6dof.html puma6dof.m gripper.html gripper.m
Lab 8 rot.html rot.m invrotaxis.html invrotaxis.m sgn.html sgn.m
Lab 9 pumamrcntrl.html pumamrcntrl.m twitch.html twitch.m motion.html motion.m
Testings
inveuler transcript.txt inveulertester.html inveulertester.m
rot and invrotaxis transcript.txt rottester.html rottester.m
Please note that inrotaxis has problems with negatives (see transscript) , I was unable to solve this problem. It may effect pumamrcntr
invpuma6dof transcript.txt invpumatester.html invpumatester.m
Please note there is a problem with theta2 and theta3 of the second set of values. When doing the lab I didn't pick it up, but did when testing.
{kind=link}
{kind=link}
{kind=link}